Nazywam się Amanda Dudka i mam 16 lat, na co dzień uczęszczam do szkoły ponadpodstawowej CKZiU w Mysłowicach (Centrum Kształcenia Zawodowego i Ustawicznego w Mysłowicach) o profilu Technik Mechatronik, w roku 2021 ukończę 2 klasę. Oprócz nauki w szkole, swojego zawodu uczę się prywatnie w domu, a dokładniej uczestniczę w projekcie z klubu „F44 red Science Club” ( TUTAJ link do strony internetowej klubu) projekt nosi nazwę „F44 Red Biohand Project” dołączyłam do niego dokładnie 28-go października 2020 roku. Założycielem klubu jest Pan Piotr Sroczyński , który – po rozmowie i konsultacjach – zaproponował mi udział w owym projekcie. Zadaniem projektu jest skonstruowanie ręki bionicznej, tworzymy różne mniejsze oraz przydatne, obwody elektroniczne w pojedynczych challenge’ach/wyzwaniach.
Wyzwanie 1 – alarm
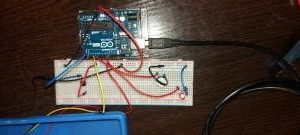
Wyzwanie pierwsze polegało na stworzeniu prostego alarmu, wykrywającego a następnie reagującego na ruch, w momencie w którym czujnik ruchu wykrywał
intruza, włączyć się miał sygnał, dźwiękowy w moim przypadku był nim buzzer , jak i świetlny tutaj dodałam dwie diody LED czerwoną (świeciła się gdy alarm był uzbrojony) i zieloną (zaświecała się po rozbrojeniu alarmu) , należało również dodać 2 przyciski (uzbrajający jak i rozbrajający) w moim przypadku tact switch THT. Tutaj mogłam się zapoznać z działaniem czujnika ruchu, mogłam też sobie utrwalić prawidłowe przyłączanie elementów elektrycznych do obwodu, bowiem na początku tego wyzwania nie zwróciłam uwagi na to gdzie trzeba podłączyć – a gdzie + z zasilania, natomiast szybko się tego nauczyłam. Pierwszym takim większym błędem jaki popełniłam w tym wyzwaniu było zastosowanie czujnika odległości, zamiast czujnika ruchu. Pamiętam że siedziałam parę godzin aby zrozumieć rzecz, która teraz jest dla mnie rzeczą oczywistą , pamiętam też że ten błąd zauważyłam poprzez nieoczekiwane odwrotne działanie czujnika (reagował on dopiero gdy intruza nie było). Napotkałam też dużo problemów które były związane z samym skryptem, przykładowo dioda która nie chciała zgasnąć, buzzer wydający dźwięk w złym czasie, oraz źle działające przyciski. W razie każdego problemu mogłam oczywiście liczyć na nauczyciela oraz jego syna. Ostatecznie udało mi się pokonać wszystkie problemy i zakończyłam moje pierwsze wyzwanie z uśmiechem oraz z wielką satysfakcją.
TUTAJ link do filmu.
TUTAJ link do zamieszczonego zdjęcia
Wyzwanie 2 – chłodnica
Challenge drugi polegał na skonstruowaniu aktywnego chłodzenia. Czyli silnik z wentylatorem jako system chłodzący miał się włączyć w momencie w którym temperatura w powietrzu przekroczy tę maksymalną którą mogliśmy sami ustalić, oprócz tego o owym załączeniu się silnika informował sygnał dźwiękowy ( i tu znowu użyłam buzzera) oraz dioda LED. Pierwszym i nie ostatnim problemem napotkanym w tym wyzwaniu był nie działający czujnik temperatury DHT11 i wilgotności prawdopodobnie został zniszczony przez niepoprawne podgrzewanie (zapalniczką co mogło spowodować stopienie się mikroelementów) bądź uległ zwarciu. Kiedy napotkałam swoje pierwsze problemy związane z tym czujnikiem, aby nie stać w miejscu postanowiłam stworzyć chłodzenie sterowane ręcznie np. went, a dokładniej silnik sterowany za pomocą potencjometru. (TUTAJ link do filmiku). W tym projekcie dowiedziałam się również co to są biblioteki programistyczne (dowiedziałam się tego na podstawie niedziałającego czujnika temperatury) i jak ich używać, były mi one potrzebne do sterowania czujnika temperatury, początkowo nie wiedziałam nawet o ich istnieniu . Moim zdaniem to wyzwanie było zdecydowanie jednym z bardziej problematycznych wyzwań, napotkałam w nim dużo przeszkód związanych z czujnikiem temperatury jak oraz z spójnością samego skryptu. Jednakże udało mi się pokonać wszystkie problemy oczywiście z niezastąpioną pomocą (TUTAJ link do filmiku gotowego projektu).
Biblioteka programistyczna jest to plik który dostarcza dane czy typy danych które są wykorzystywane z poziomu kodu źródłowego
Wyzwanie 3 – Ramię robota sterowane joystickiem
Wyzwanie trzecie polegało na skonstruowaniu, jak sama nazwa wskazuje ramienia robota. Do stworzenia samego ramienia były potrzebne dwa serwomotory (w tym przypadku były to sg90) i oczywiście joystick do sterowania. Konstrukcja którą sterowały serwomotory mogła być wykonana z dowolnego materiału w dowolny sposób. Ja osobiście wybrałam drewniany materiał ( tak jak na zdjęciu). Samo wymyślenie designu konstrukcji wymagało koncentracji i precyzji. Całość wymyślałam na bieżąco dlatego też ramie posiadała dość dużo niedoskonałości. Budowę rozpoczęłam od stworzenia podstawki z większego kawałka drewna, całą resztę wykonałam w kolejności od dołu do góry z drewnianych patyczków lekarskich. Najbardziej wymagającymi częściami były części w których są umieszczone serwomotory, ponieważ tam była potrzebna szczególna precyzja i pomysłowość. Oczywiście w tym wyzwaniu nie mogło też zabraknąć błędów, po zebraniu wszystkich potrzebnych elementów chciałam początkowo nauczyć się pracy z jednym serwomotorem, a następnie dopiero spróbować z dwoma, było to niestety nieprzemyślane ponieważ maksymalne napięcie na serwomotorze wynosi 6v a ja przyłączyłam go do baterii 9v??. Po zakupie kolejnego serwomotoru okazało się że sprzedano mi nie sprawny więc trzeba było kupić trzeci, który na szczęście okazał się być sprawny. Tak więc wszystko mogłam ze sobą połączyć i cieszyć się działającym prowizorycznym ramieniem. Tutaj mogłam nauczyć się większej precyzji, wytrwałości w dążeniu do celu

(TUTAJ link do filmiku)
Wyzwanie 4 – projektowanie w programie 3D „Fusion 360”
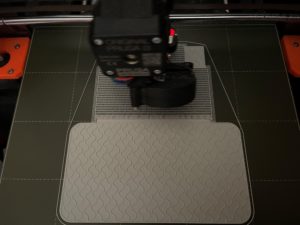
Ten challenge (jest w toku !) polegał na zaprojektowaniu (projektujemy części mechatroniki) dowolnej figurki/konstrukcji, która potem miała być wydrukowana – i tak też się potem stało. Przed zainstalowaniem i rozpoczęciem projektowania, zostaliśmy wprowadzeni do programu, oraz zostało nam przedstawione jak to mniej więcej działa, dzięki czemu mogłam w łatwiejszy sposób rozpocząć naukę z programem. Przed zainstalowaniem zastanawiałam się cały wieczór, co mogę wymyślić, gdyż chciałam zrobić coś przydatnego ale też chciałam zaskoczyć pomysłowością. Początkowo chciałam zrobić zwykłą figurkę (miał być to kot) ale stwierdziłam że będzie bezużyteczny, więc postanowiłam zrobić podstawkę na płytkę stykową oraz na kontroler „Arduino”. (zdjęcie poniżej).
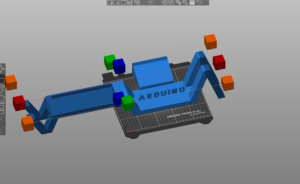
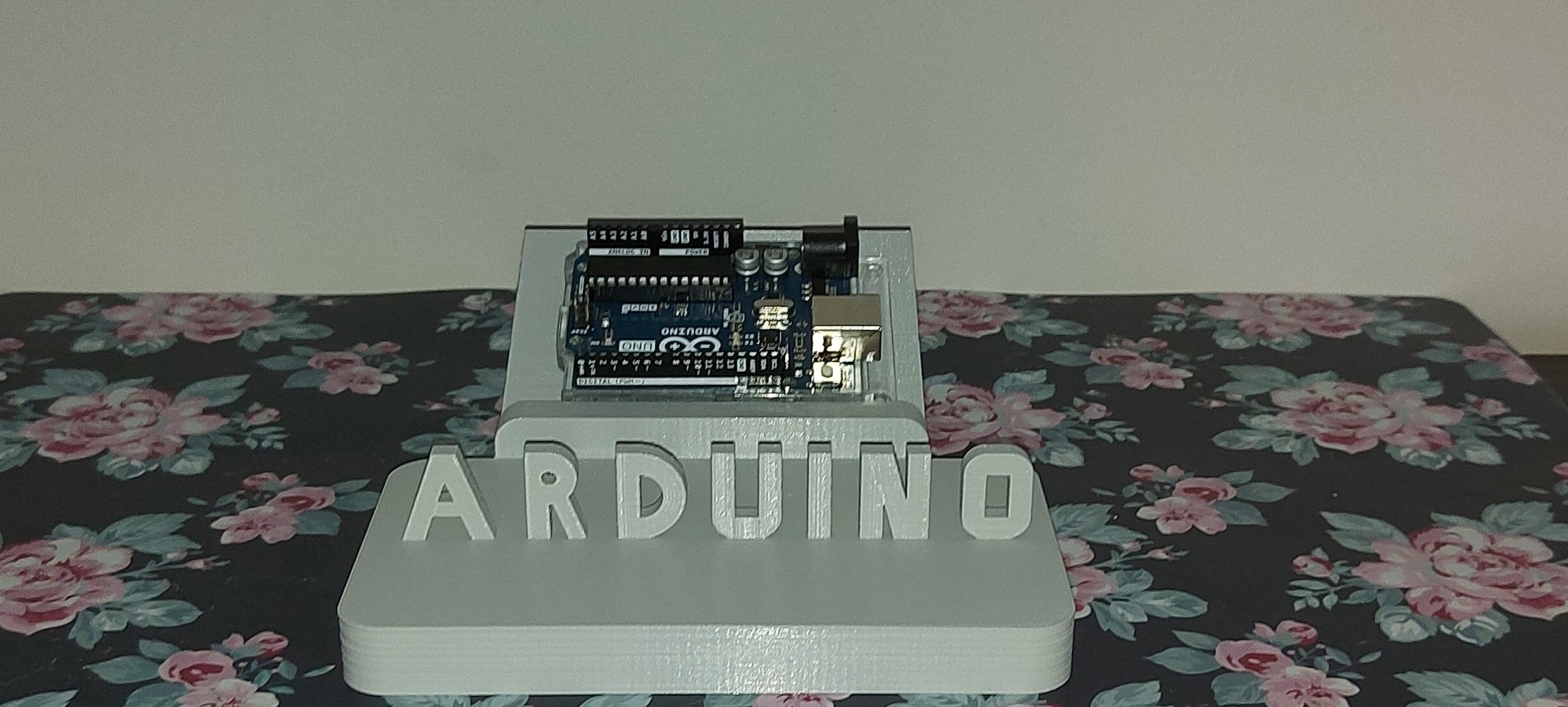
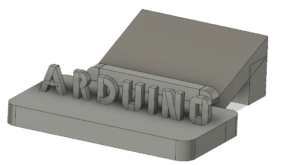
Jednak jak można zauważyć, na zdjęciu przeliczyłam się trochę i zaprojektowałam zbyt duży rozmiar, taki który nie zmieścił się na stole drukarki. Tak więc nie poddając się postanowiłam nadal się trzymać projektu związanego z tą podstawką. W ten czas wymyśliłam oraz zrobiłam podstawkę na samo „Arduino” (zdjęcie poniżej) . Na szczęście ten plan wypalił i projekt zaliczył się do wydruku.
Podczas przygotowywania projektu czwartego przydała mi się wyobraźnia przestrzenna i tak jak w poprzednich wyzwaniach bardzo przydatna była wytrwałość. I tak kolejne wyzwanie zakończyło się sukcesem.
Poniżej zamieszczone zdjęcia z procesu drukowania.
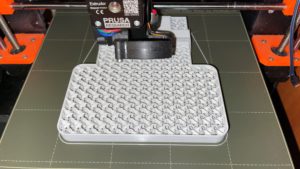
Poniżej zdjęcia po wydrukowaniu.




Powyżej, zamieszczone są opisy wszystkich wyzwań, służyły mi jako podparcie w konferencji w której byłam prelegentem, Więcej informacji na temat konferencji znajduje się TUTAJ. Natomiast poniżej link do zapisu transmisji na żywo TUTAJ (występuje w ok. 1:30 godz.)
Amanda Dudka